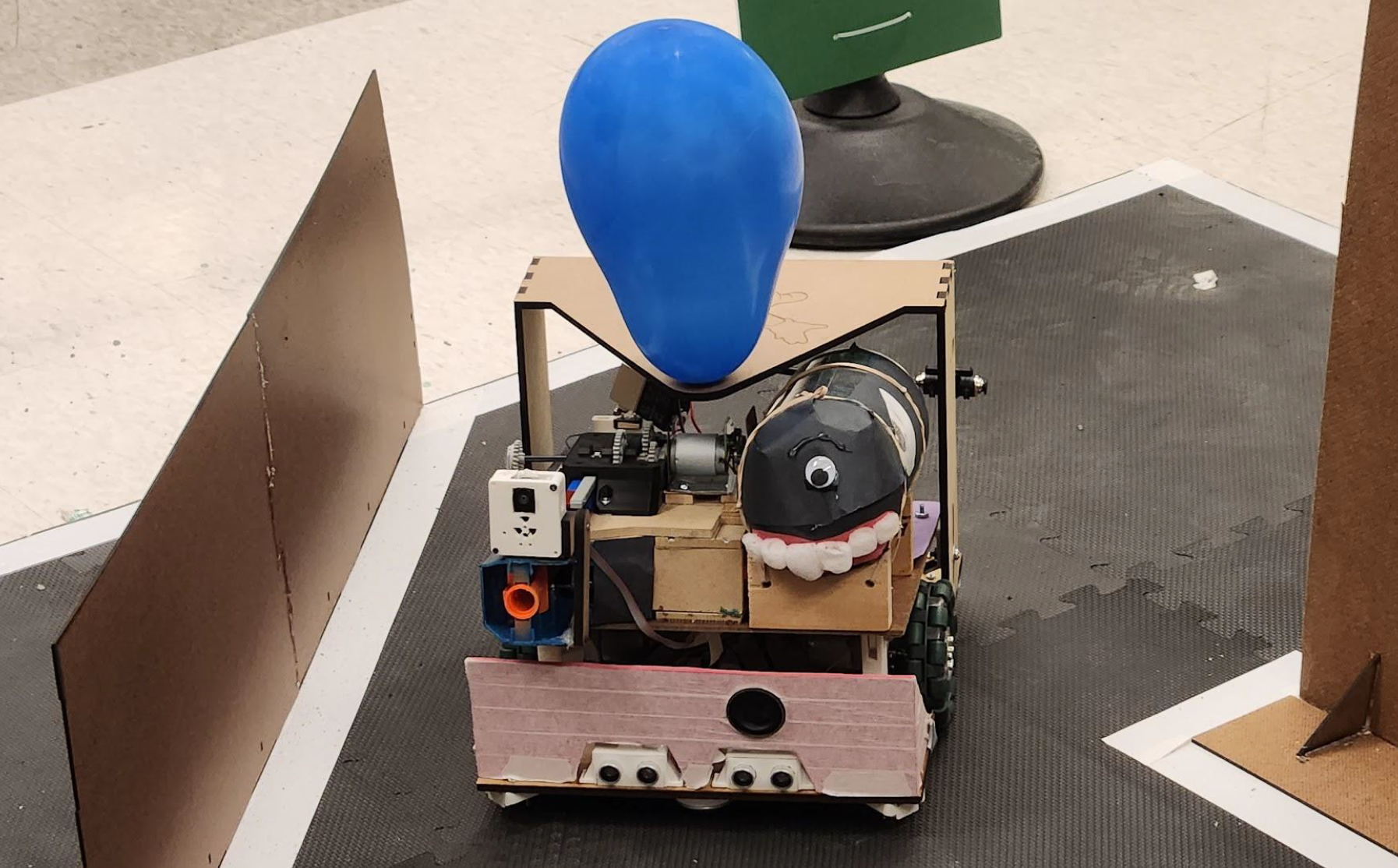
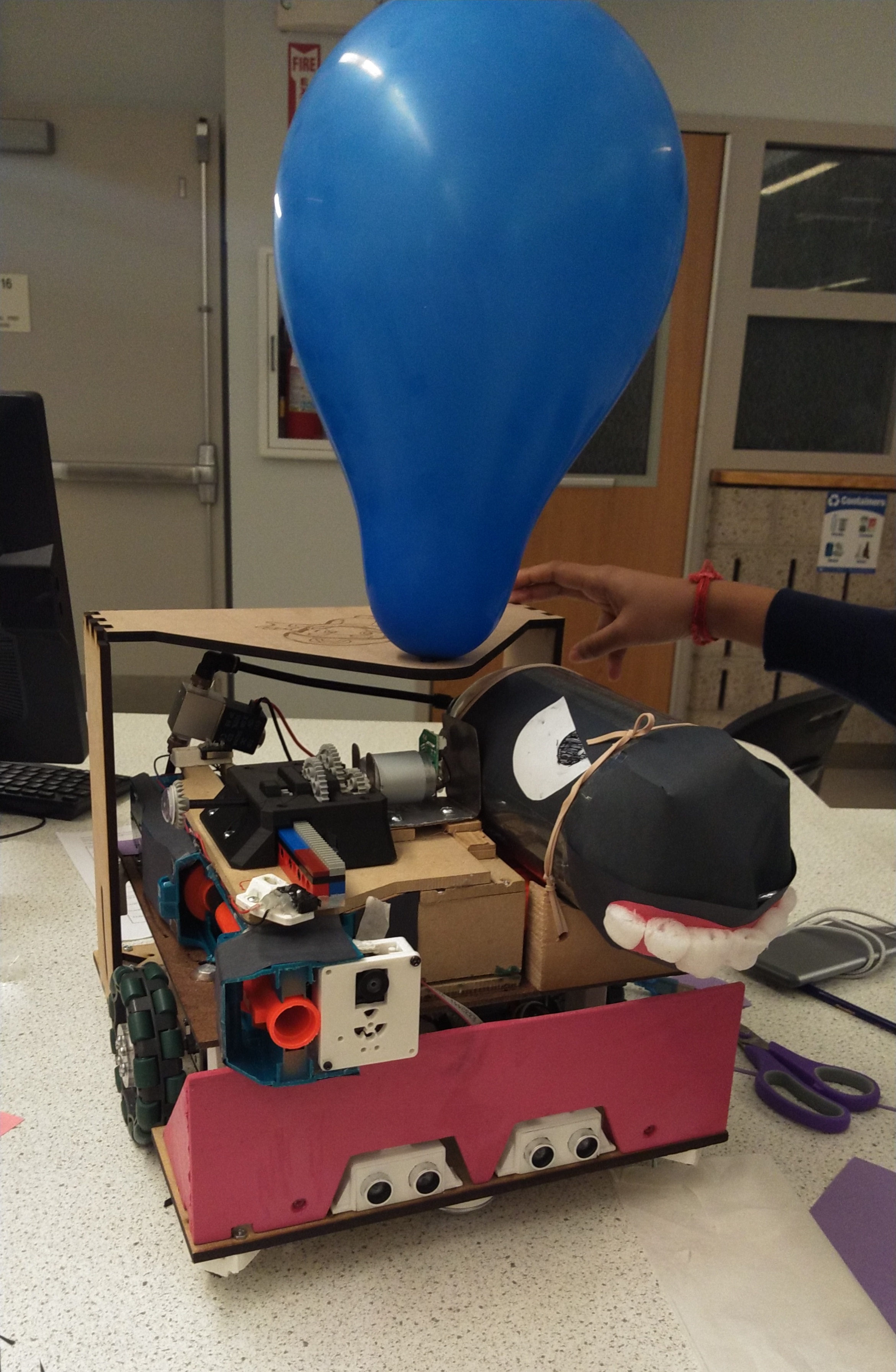
I built this robot with a team for a design competition. It is programmed to target and shoot opponent robots.
It includes a PixyCam, other sensors, two Arduinos, and an adapted pneumatic NERF gun.
I also made a board for it which played music and sound effects during the competition.